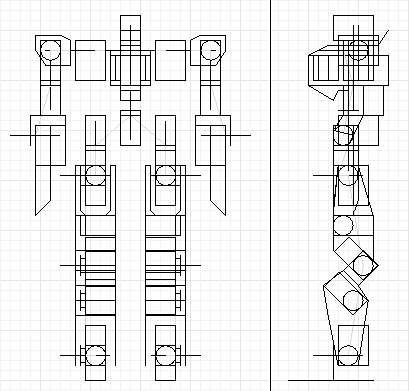
R-Blue4.1の構造を参考に取敢えず大きさを出してみたもの。
全高約370mm
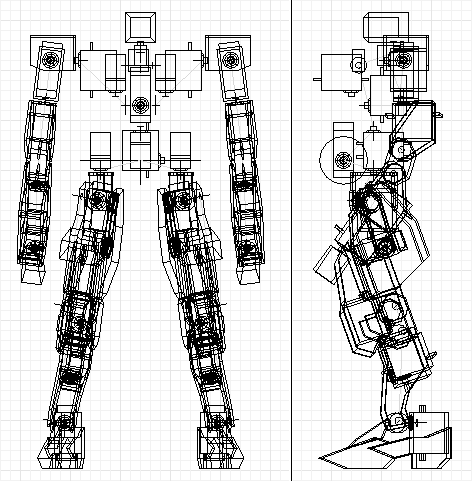
必要そうな関節を配置して、一部に外装を配置したもの。
全高約460mm
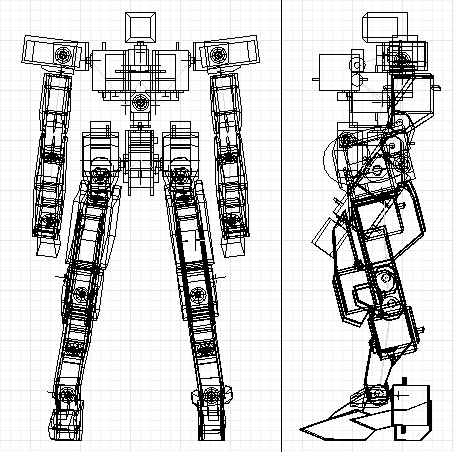
弐式があまりにも大型過ぎたためダウンサイジングを図る。
同時に股関節の接続軸の順番を変えてアニメロボットっぽく。
全高約430mm
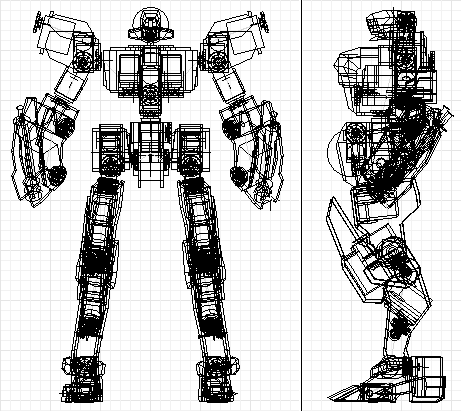
サーボのパッケージの加工を前提に各パーツを最適化し更にダウンサイジング。
つま先をつけてみる。
全高約390mm
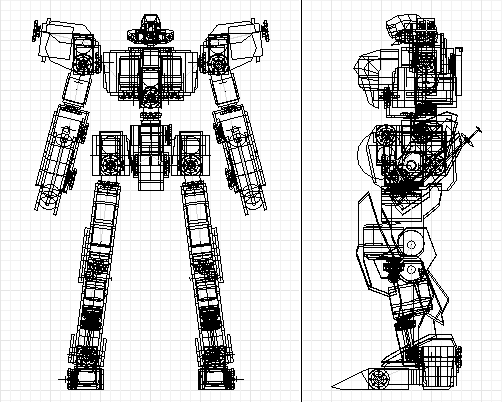
今ひとつ詰めていなかった脹脛の構造を決める。
ついでに足首も決める。
全高約380mm
|
|
|
|
|
| 壱式 R-Blue4.1の構造を参考に取敢えず大きさを出してみたもの。 全高約370mm |
弐式 必要そうな関節を配置して、一部に外装を配置したもの。 全高約460mm |
四式 弐式があまりにも大型過ぎたためダウンサイジングを図る。 同時に股関節の接続軸の順番を変えてアニメロボットっぽく。 全高約430mm |
伍式 サーボのパッケージの加工を前提に各パーツを最適化し更にダウンサイジング。 つま先をつけてみる。 全高約390mm |
伍式弐型 今ひとつ詰めていなかった脹脛の構造を決める。 ついでに足首も決める。 全高約380mm |